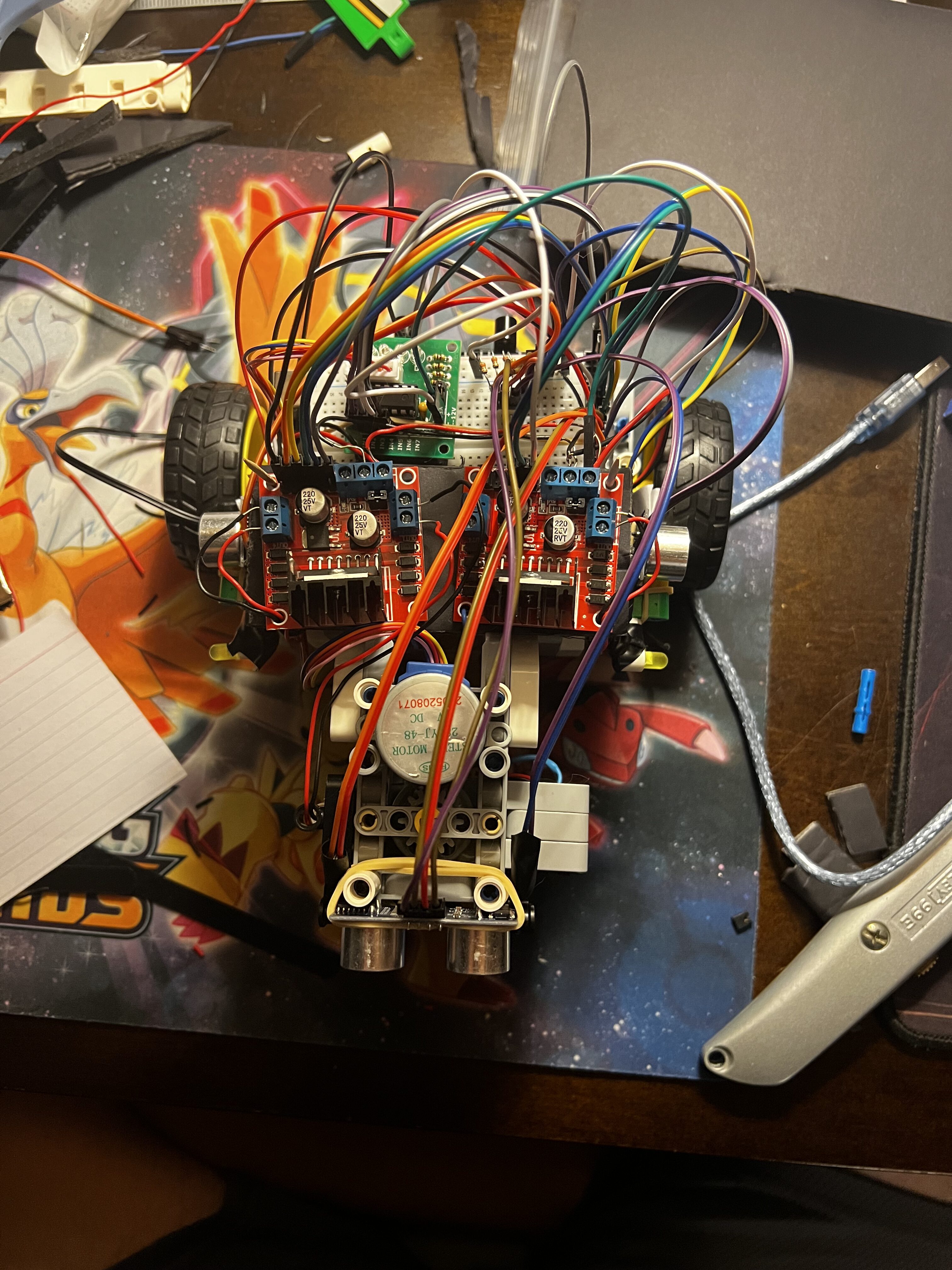
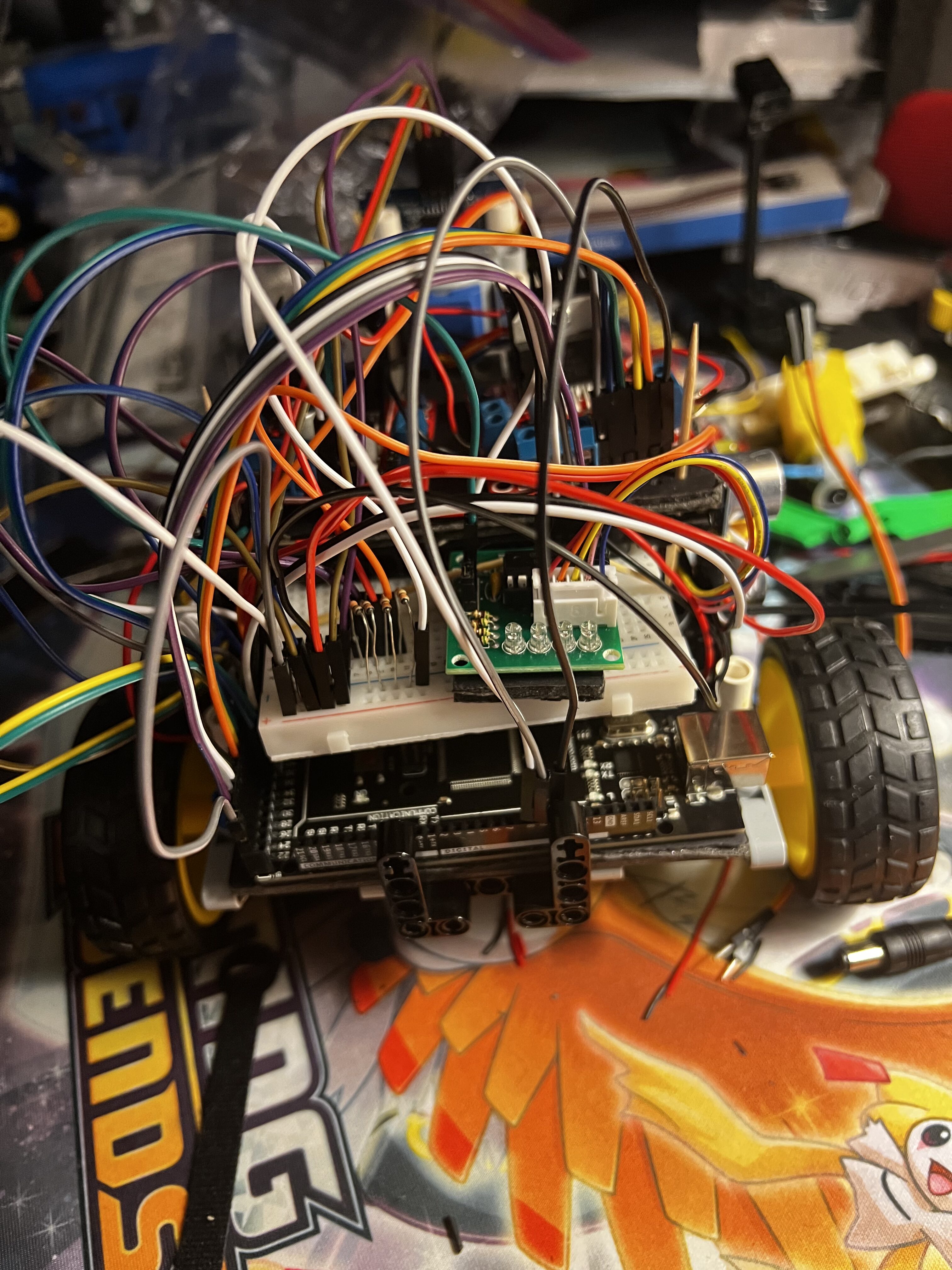
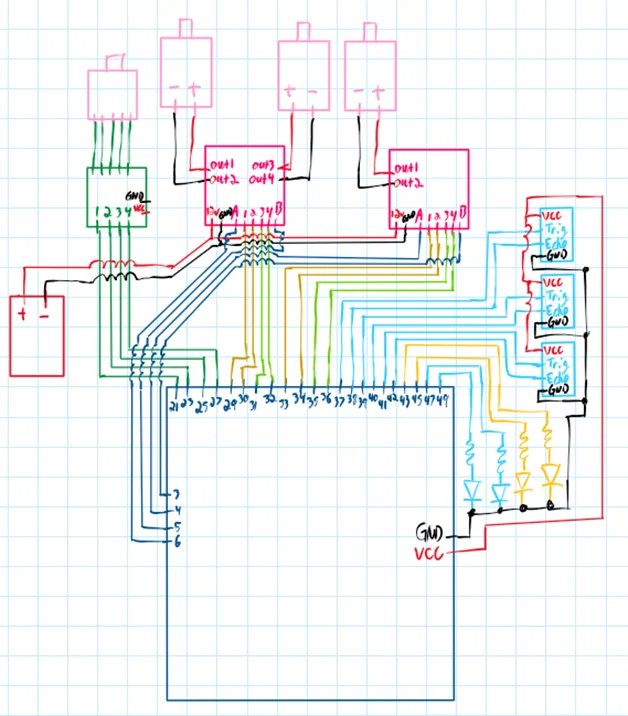
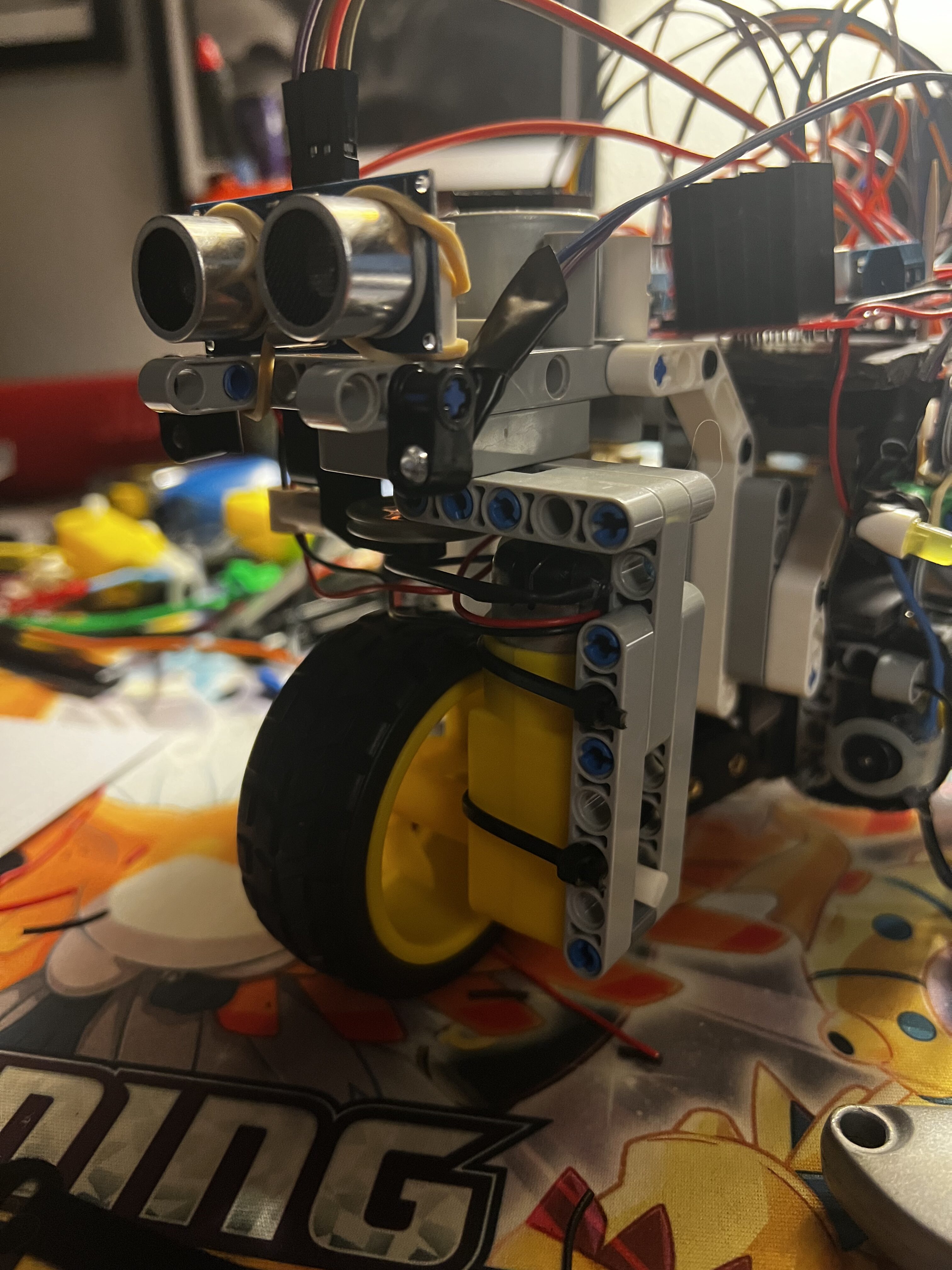
This project tasked me with building and programming a small robot car that can roll down a hallway autonomously without hitting any walls. The car should consist of three DC motors, two in the back and one in the front, along with a stepper motor attached to the front DC motor to steer the vehicle, and at least three ultrasound sensors to detect its surroundings. When the car reaches the end of the hallway, it should use the stepper motor to make a 180-degree turn on the spot, without hitting any of the walls around it. Along with these requirements, when the car is moving forward, 2 clear LEDs should turn on as headlights, and when the car is turning left or right, a respective yellow led on the side of the car should light up.